1、高空作业车
1.分类
按上车部分的升降机构的型式,高空作业车可划分为四种基本型式,见图。
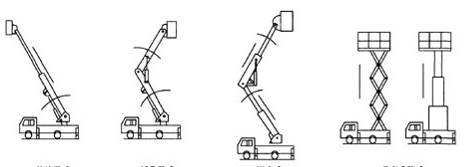
a.伸缩臂式 b.折叠臂式 c.混合臂式 d.垂直升降式
图7-9 常用高空作业车型式
1)伸缩臂式
高空作业车各工作臂之间的相对运动只能进行伸缩。
特点:结构较复杂,操作简单直观,结构紧凑,机动性好,作业范围大,回转时占用空间小,跨越障碍能力相对较差。

图7-10伸缩臂式高空作业车
(2)折叠臂式
高空作业车工作臂之间的连接全部采用铰接型式。所以又把这种高空作业车叫做铰接式高空作业车。
特点:结构比较简单,跨越障碍能力强,可带起重功能,回转时占用空间大,操作比较繁琐。

图7-11 折叠臂式高空作业车
(3)混合臂式
高空作业车工作臂之间既有铰接,也有伸缩。图中上、下工作臂可伸缩,上工作臂与下臂铰接。
特点:结构复杂多变,相对紧凑,操作较简单直观,跨越障碍能力很强,可以实现特定功能。

图7-12混合臂式高空作业车
(4)垂直升降式
高空作业车升降机构其原理与检查时高空作业平台相同,只能在垂直方向上进行运动,本书不作重点介绍。
特点:结构简单价格低,承载能力大,作业高度低,作业范围受限制。

图7-13垂直升降式高空作业车
按照绝缘性能分类:
(1)绝缘型
工作平台、部分工作臂采用绝缘材料(一般为玻璃钢)制作,工作平台和大地之间阻抗很大。作业车可以在高压线路上带电作业。绝缘型高空作业车一般用于电力设施的带电抢修和维护。

图7-14 绝缘型高空作业车
(2)非绝缘型
作业车不具备绝缘功能,不能进行带电工作,高空作业时需要远离高压带电体。非绝缘高空作业车:广泛用于市政、电力、交通、园林、电信、港口、油田、风电、变电站、广告安装、企事业单位等。

图7-15非绝缘高空作业车
2.基本原理
高空作业车采用定型生产的汽车底盘作为行走机构,实现行走(转场)和运载功能。除汽车底盘外,为实现高空作业功能,高空作业车的构成还包括动力系统、工作机构、机械结构、液压和电气控制系统以及安全装置几部分。
使用汽车底盘作为行走机构,使高空作业车具有了其它种类高空作业平台所不具备的高机动性能,从而具有快速转场能力。汽车底盘发动机的动力强大,也是高空作业车实现高空作业功能的主动力源。
高空作业车动力系统一般指实现高空作业所需要的能源。高空作业车通常使用汽车底盘发动机作为动力源,通过取力系统将底盘发动机的部分动力取出,用以驱动高空作业车的工作机构和伸展结构。这种情况下,底盘、发动机、取力装置以及控制取力装置工作或断开的取力控制系统构成了高空作业车的动力系统。除使用底盘发动机作为动力源外,也有少部分车型使用单独的发动机或使用蓄电池作为动力源。
工作机构是为实现高空作业不同运动要求而设置的。要使装载工作人员和工具的工作平台从某一位置运动到空中任一位置,工作平台要能实现垂直方向和两个水平方向的运动。为实现三个方向的运动并保证平台运行过程中始终不发生倾斜,高空作业车设有变幅机构、伸缩机构、回转机构和调平机构。变幅机构也可被叫做俯仰机构,高空作业车的变幅是指改变工作平台与回转中心轴线之间的距离,即幅度。高空作业车的变幅机构一般采用液压油缸推动工作臂改变工作臂和水平面夹角实现变幅。伸缩机构实现高空作业车相互套叠的工作臂的伸出或缩回,改变工作臂的长短。工作臂行驶状态缩在基本臂内,不影响高速行驶,工作时伸出达到所需长度。伸缩机构一般采用液压油缸配合钢丝绳滑轮组或链条链轮组的同步伸缩。回转机构是为实现高空作业车的回转运动而设置的机构。高空作业车的一部分(一般指上车部分或回转部分)相对与另一部分(一般指下车部分或非回转部分)做相对的旋转运动称为回转。国内高空作业车回转范围一般为全回转(回转360º以上)。调平机构是高空作业平台的专有机构,是用以实现工作臂变幅,工作臂和水平面夹角不断变化时,工作平台和地面夹角始终不变,保证工作人员没有倾覆危险。
高空作业车机械结构包括工作臂、回转平台、副车架(车架大梁,门架、支腿等)等。伸展结构是高空作业车的骨架。它承受高空作业车的自重以及作业时的各种外载荷。各工作机构的零部件都是安装或支承这个骨架上的。
液压和电气控制系统用于实现工作机构的运动,如动力传递的方向,机构运动速度快慢,以及机构起停等。通过液压驱动和电气系统的控制,实现高空作业车各机构的起动、调速、换向和停止,从而达到高空作业要求的各种动作。
2、高空作业平台
高空作业平台是用于高空作业、设备安装、检修等可移动性高空作业的产品。
1.分类
主要产品有:剪叉式高空作业平台、曲臂式高空作业平台、自行式高空作业平台、铝合金高空作业平台、防爆高空作业平台、拖拉移动式高空作业平台、电动高空作业平台、自行走直臂高空作业平台、越野式高空作业平台、全向自行走高空作业平台:
2.工作原理
液压油由叶片泵形成一定的压力,经滤油器、隔爆型电磁换向阀、节流阀、液控单向阀、平衡阀进入液缸下端,使液缸的活塞向上运动,提升重物,液缸上端液压油经隔爆型电磁换向阀回到油箱,其额定压力通过溢流阀进行调整,通过观察压力表读数值。
液缸的活塞向下运动(既重物下降)。液压油经防爆型电磁换向阀进入液缸上端,液缸下端回油经平衡阀、液控单向阀、节流阀、隔爆型电磁换向阀回到油箱。为使重物下降平稳,制动安全可靠,在回油路上设置平衡阀,平衡回路、保持压力,使下降速度不受重物而变化,由节流阀调节流量,控制升降速度。 为使制动安全可靠,防止意外,增加液控单向阀,即液压锁,保证在液压管线意外爆裂时能安全自锁。安装了超载声控报警器,用以区别超载或设备故障。
2.主要结构和特点
(1)剪叉式
剪叉式高空作业平台是用途广泛的高空作业专用设备。它的剪叉式机械结构,使升降台起升后有较高的稳定性,宽大的作业平台和较高的承载能力,使高空作业范围更大,并适合多人同时作业。它使高空作业效率更高,更安全。
特点:举升机构采用高强度锰钢钜形管制作。设有防止升降台超载的安全保护装置。设有防止液压管路破裂的安全保护阀。设有停电情况下的应急下降装置。根据不同要求可选择不同动力形式(如:三相交流电源、单相交流电源、直流电源和内燃动力等),加配上手动液压装置,可在停电或无电源场所照常升降工作,并可加伸缩平台,在平台长度不足时可延伸至所需位置,从而提高工作效率。

图7-2 剪叉式高空作业平台
(2)曲臂式
曲臂式高空作业平台叫高空作业平台车,主要用于比较高的作业环境,承载一个人到两个人之间,消防队普遍使用这种升降机。有柴油机自行式、电瓶自行式与拖车式三种动力形式,具有伸缩臂,能悬伸作业,能够跨越一定的障碍或在一处升降进行多点作业;360度旋转,平台载重量大,可供两人或多人同时作业并可搭载一定的设备;升降平台移动性好,转移场地方便;外型美观,适于室内外作业和存放。适用于车站、码头、商场、体育场馆、小区物业、厂矿车间等大范围作业。

图7-3曲臂式高空作业平台
(3)自行式
升降台自身具有行走及转向驱动功能,不需人工牵引,不需外接电源 移动灵活方便,令高空作业更方便快捷,是现 代企业高效安全生产之 理想高空作业设备。辅助自行走式系列升降机,具有自动行走功能,能够在不同工作状态下,不需外接电源,不需外来动力牵引,移动灵活、操作方便、升降自如,只需一人便可完成前进、后退。特别适合于机场候机楼、车站、码头、商场、体育场馆、小区物业、厂矿车间等较大范围的作业。

图7-4 自行式高空作业平台
(4)铝合金桅柱式
铝合金移动式平台代表有单立柱铝合金升降机,双立柱铝合金升降机,三立柱铝合金升降机,四立柱铝合金升降机。一般适用于1-2人登高作业,单柱高度在10米以下,双柱一般在12米以下,多柱高度可以达到20米左右。采用桅柱式结构,载重量大,平台面积大,稳定性极好,运转灵活,广泛用于工厂、宾馆、餐厅、车站、机场影剧院、展览馆等场所,是保养机具、油漆装修、调换灯具、电器、清洁保养等。
按照立柱数量可分为:单立柱铝合金高空作业平台、双立柱铝合金高空作业平台、三立柱铝合金高空作业平台、四立柱铝合金高空作业平台:
按照性能可分为:移动式铝合金高空作业平台、固定式铝合金高空作业平台伸缩台面铝合金高空作业平台、折叠式铝合金高空作业平台。
   
a.单立柱 b.双立柱 c. 三立柱 d.四立柱
图7-5 桅柱式平台(按照立柱数量分类)
(5)套缸式
套缸式高空作业平台为多级液压缸直立上升,液压缸高强度的材质和良好的机械性能,塔形梯状护架,使升降台有更高的稳定性。即使身处20米高空,也能感受其优越的平稳性能。广泛适用于车站、码头、酒店、机场以及各种需要登高作业的场合。

图7-6 套缸式高空作业平台
(6)导架爬升式
适用于高层建筑外墙装修,玻璃幕墙施工、建筑外表面的清洁等。
平台在纵横方向均可自由组合变化,联合使用,满足建筑外表面为平面和曲面的变化,变频控制运行平稳,配备防超载装置,防不平衡载荷装置,匀速限速器,手动释放装置,以及同步运行装置;采用不固定基础,便于变换施工位置,运输方便
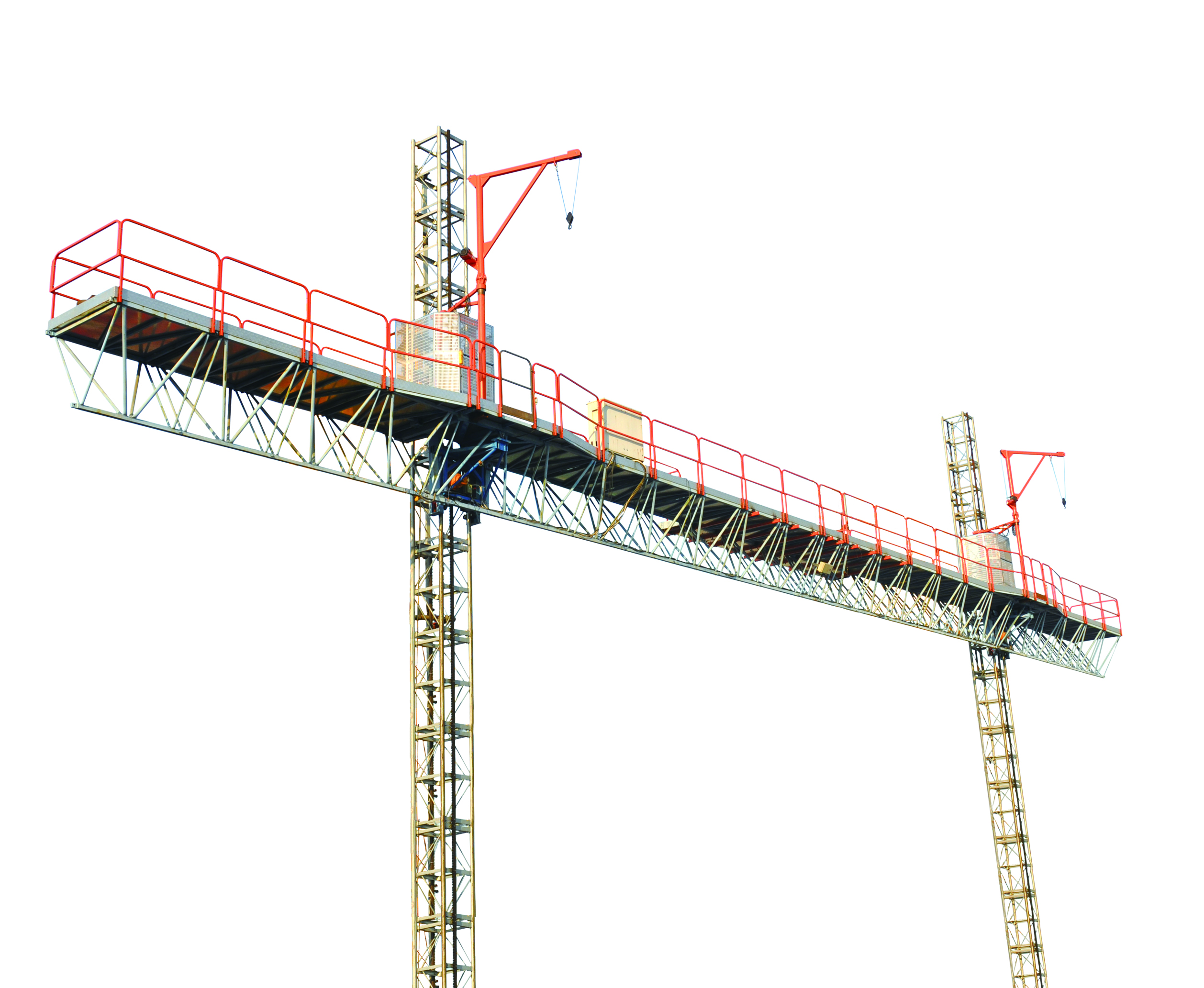
图7-7 导架爬升式工作平台
(7)蜘蛛式高空作业平台
平台采用蜘蛛腿式支撑机构、伸缩式臂架结构,可使它在受局限的空间和地面上工作,从而有效地对建筑物进行维护保养及清洁,对地面的压力非常小,尤其适合在建筑物内的瓷砖、大理石等地面上工作。
 
图7-8 蜘蛛式伸缩臂架高空作业平台
|