1.分类
按上车部分的升降机构的型式,高空作业车可划分为四种基本型式,见图。 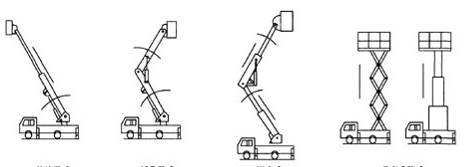
a.伸缩臂式b.折叠臂式c.混合臂式d.垂直升降式 图7-9常用高空作业车型式
1)伸缩臂式
高空作业车各工作臂之间的相对运动只能进行伸缩。
特点:结构较复杂,操作简单直观,结构紧凑,机动性好,作业范围大,回转时占用空间小,跨越障碍能力相对较差。 
图7-10伸缩臂式高空作业车
(2)折叠臂式
高空作业车工作臂之间的连接全部采用铰接型式。所以又把这种高空作业车叫做铰接式高空作业车。
特点:结构比较简单,跨越障碍能力强,可带起重功能,回转时占用空间大,操作比较繁琐。

图7-11折叠臂式高空作业车
(3)混合臂式
高空作业车工作臂之间既有铰接,也有伸缩。图中上、下工作臂可伸缩,上工作臂与下臂铰接。
特点:结构复杂多变,相对紧凑,操作较简单直观,跨越障碍能力很强,可以实现特定功能。 
图7-12混合臂式高空作业车
(4)垂直升降式
高空作业车升降机构其原理与检查时高空作业平台相同,只能在垂直方向上进行运动,本书不作重点介绍。
特点:结构简单价格低,承载能力大,作业高度低,作业范围受限制。 
图7-13垂直升降式高空作业车
按照绝缘性能分类:
(1)绝缘型
工作平台、部分工作臂采用绝缘材料(一般为玻璃钢)制作,工作平台和大地之间阻抗很大。作业车可以在高压线路上带电作业。绝缘型高空作业车一般用于电力设施的带电抢修和维护。

图7-14绝缘型高空作业车
(2)非绝缘型
作业车不具备绝缘功能,不能进行带电工作,高空作业时需要远离高压带电体。非绝缘高空作业车:广泛用于市政、电力、交通、园林、电信、港口、油田、风电、变电站、广告安装、企事业单位等。

图7-15非绝缘高空作业车
2.基本原理
高空作业车采用定型生产的汽车底盘作为行走机构,实现行走(转场)和运载功能。除汽车底盘外,为实现高空作业功能,高空作业车的构成还包括动力系统、工作机构、机械结构、液压和电气控制系统以及安全装置几部分。
使用汽车底盘作为行走机构,使高空作业车具有了其它种类高空作业平台所不具备的高机动性能,从而具有快速转场能力。汽车底盘发动机的动力强大,也是高空作业车实现高空作业功能的主动力源。
高空作业车动力系统一般指实现高空作业所需要的能源。高空作业车通常使用汽车底盘发动机作为动力源,通过取力系统将底盘发动机的部分动力取出,用以驱动高空作业车的工作机构和伸展结构。这种情况下,底盘、发动机、取力装置以及控制取力装置工作或断开的取力控制系统构成了高空作业车的动力系统。除使用底盘发动机作为动力源外,也有少部分车型使用单独的发动机或使用蓄电池作为动力源。
工作机构是为实现高空作业不同运动要求而设置的。要使装载工作人员和工具的工作平台从某一位置运动到空中任一位置,工作平台要能实现垂直方向和两个水平方向的运动。为实现三个方向的运动并保证平台运行过程中始终不发生倾斜,高空作业车设有变幅机构、伸缩机构、回转机构和调平机构。变幅机构也可被叫做俯仰机构,高空作业车的变幅是指改变工作平台与回转中心轴线之间的距离,即幅度。高空作业车的变幅机构一般采用液压油缸推动工作臂改变工作臂和水平面夹角实现变幅。伸缩机构实现高空作业车相互套叠的工作臂的伸出或缩回,改变工作臂的长短。工作臂行驶状态缩在基本臂内,不影响高速行驶,工作时伸出达到所需长度。伸缩机构一般采用液压油缸配合钢丝绳滑轮组或链条链轮组的同步伸缩。回转机构是为实现高空作业车的回转运动而设置的机构。高空作业车的一部分(一般指上车部分或回转部分)相对与另一部分(一般指下车部分或非回转部分)做相对的旋转运动称为回转。国内高空作业车回转范围一般为全回转(回转360?以上)。调平机构是高空作业平台的专有机构,是用以实现工作臂变幅,工作臂和水平面夹角不断变化时,工作平台和地面夹角始终不变,保证工作人员没有倾覆危险。
高空作业车机械结构包括工作臂、回转平台、副车架(车架大梁,门架、支腿等)等。伸展结构是高空作业车的骨架。它承受高空作业车的自重以及作业时的各种外载荷。各工作机构的零部件都是安装或支承这个骨架上的。
液压和电气控制系统用于实现工作机构的运动,如动力传递的方向,机构运动速度快慢,以及机构起停等。通过液压驱动和电气系统的控制,实现高空作业车各机构的起动、调速、换向和停止,从而达到高空作业要求的各种动作。
3.常见设备 1、普通型
2、高树剪枝
3、高空绝缘架线
4、桥梁检修
5、高空摄影、摄像 |